
Cyclists Hub is supported by its readers. We may receive a commission if you buy products using our links. All content on Cyclists Hub is written by humans, not robots. Learn More
All content on Cyclists Hub is written by humans, not robots. Learn More
I had a fascinating chat with Andy Chen from Terasilic at Eurobike 2025 about bicycle radars. Terasilic offers radar solutions (mainly sensors) to several well-known companies, so it is the best source to answer technical questions.
Andy agreed to provide me with a technical perspective on bicycle radars that I can share with you. The information he shared was eye-opening. Below, you’ll learn how bicycle radars work and their limitations. Rest assured, this is the most in-depth resource on the topic.
- What Is a Bicycle Radar and Why Should You Use It?
- How Detection Actually Works (Technical Explanation)
- Why Do False Positives Happen?
- Maximum Detection Distance Range and Accuracy
- False Negatives
- How Many Objects Can Radars Detect at Once?
- Do Bike Radars Interfere with Each Other?
- Why Bicycle Radars Struggle with Side Visibility Detection
- How Can AI and Machine Learning Improve Detection?
- Radar Hardware Limitations
- What Factors Affect the Radar Performance?
- What Are the Challenges in Radar Design?
- What Does the Future of Bicycle Radars Look Like?
- Conclusion
What Is a Bicycle Radar and Why Should You Use It?
A bicycle radar is a safety device that mounts on the back of your bike and uses radar technology to detect vehicles approaching from behind. It visually and audibly alerts you through a connected bike computer or smartphone, so you know when traffic is coming. Many models also pair with lights, automatically adjusting brightness or flashing patterns to increase your visibility.
Cyclists use radar in various situations, from daily commutes in busy traffic to long training rides on open roads. It’s especially valuable for solo riders, giving them an extra layer of awareness and confidence. By warning you early about approaching cars, a bicycle radar helps you stay alert, make safer decisions, and ride with greater peace of mind.
How Detection Actually Works (Technical Explanation)
Below, you’ll learn how bicycle radars detect objects and distinguish between them.

Radar uses FMCW (Frequency-Modulated Continuous Wave) or CW (Continuous Wave) modulation to transmit radio signals (e.g., at 24 GHz), and then listens for reflections. Based on the time delay and Doppler shift of the reflected wave, the radar estimates:
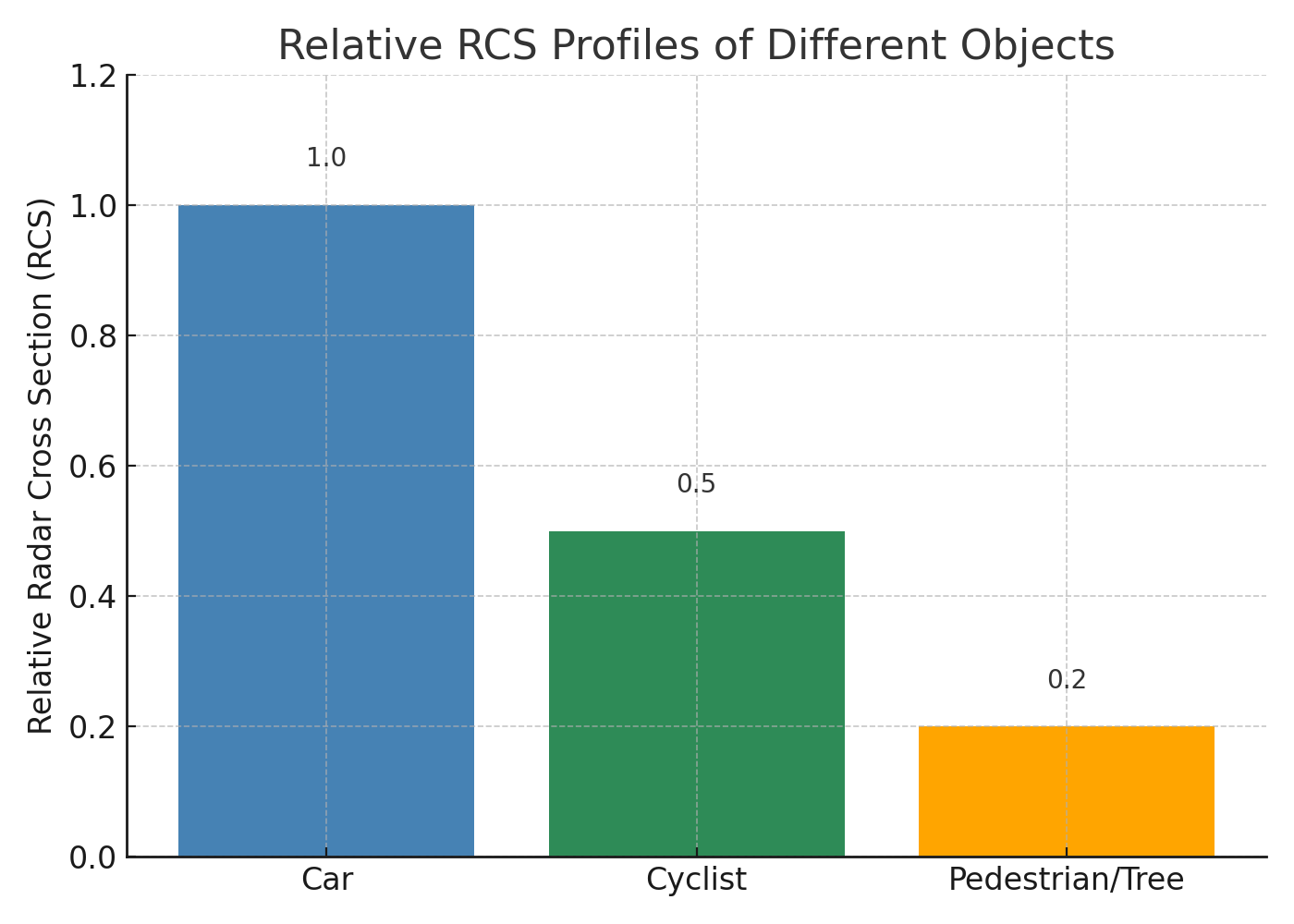
1. Radar Cross Section (RCS) gives a first clue about the “size” of the object.
- Cars have a large metallic body, resulting in a high RCS (strong reflection).
- Cyclists are smaller, with bike frames and moving legs, resulting in a medium RCS, but it fluctuates.
- Pedestrians/trees are much smaller, resulting in low RCS and weaker reflections.
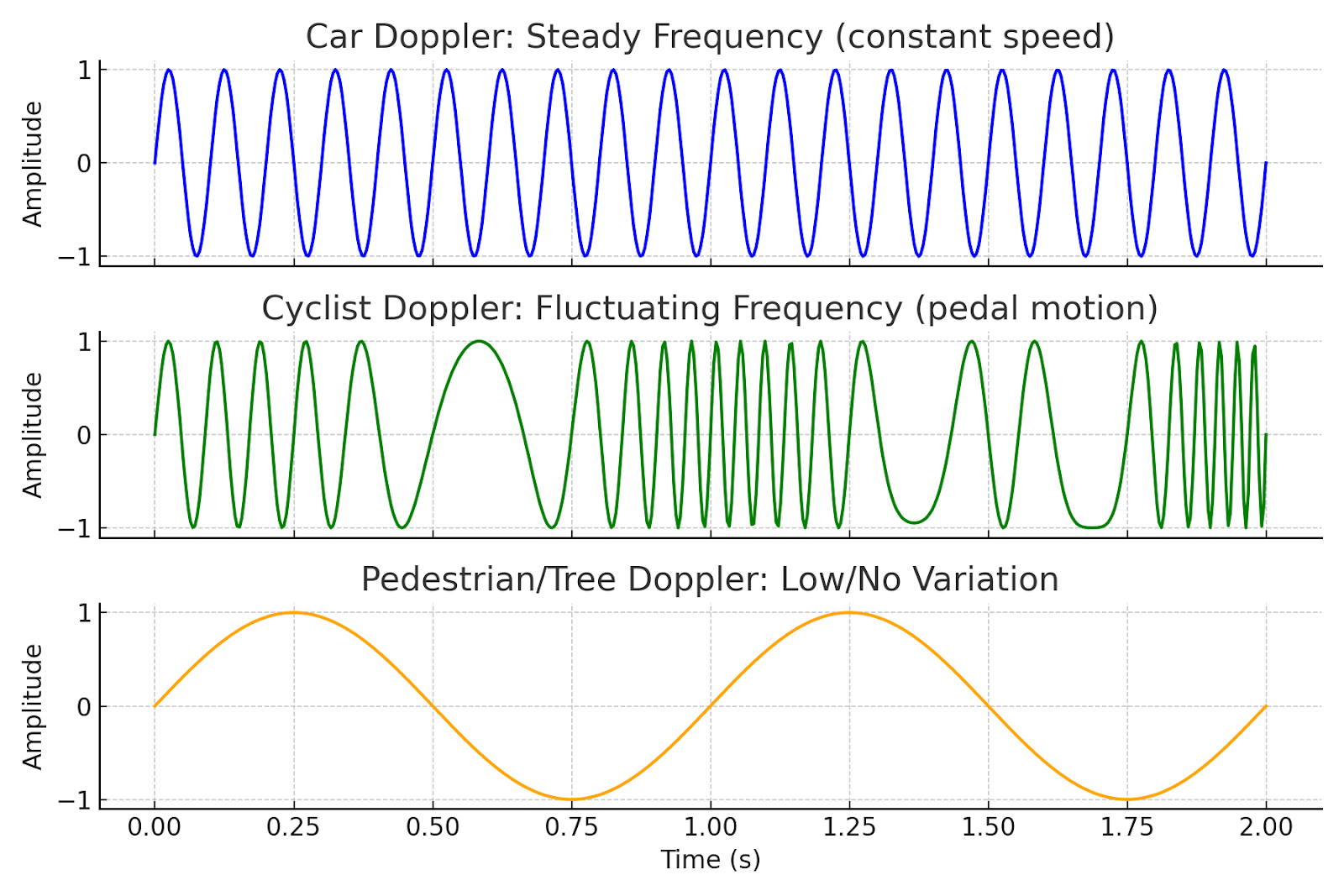
2. Doppler Signature (Velocity Pattern) indicates to the radar whether the object is moving and its velocity pattern.
- Cars: steady Doppler shift (constant velocity).
- Cyclists: pedaling creates a fluctuating Doppler signature (legs and wheels in motion).
- Pedestrians: very low or no Doppler shift (walking speed, not steady).
3. Range & Angle Tracking movement patterns help classify object types.
- Radar continuously measures distance and angle of arrival.
- Cars approach quickly at a higher relative speed.
- Cyclists move more slowly, often in the same lane as the rider.
- Large static objects (trees, signposts) stay at a fixed range/angle.
4. Pattern Recognition & AI
- Threshold-based rules:
- High RCS + steady Doppler → car
- Medium RCS + fluctuating Doppler → cyclist
- Low RCS + no Doppler → pedestrian/tree
- Machine learning (future systems):
- Train models on large datasets to recognize subtle features in radar “signatures.”
- Combine with a camera (sensor fusion) for higher accuracy.
5. Example Flow
- Raw radar signal → distance, speed, angle, RCS.
- Signal analysis → detect size + motion pattern.
- Classification → car, cyclist, pedestrian, or object.
- Output to rider → warning or alert.
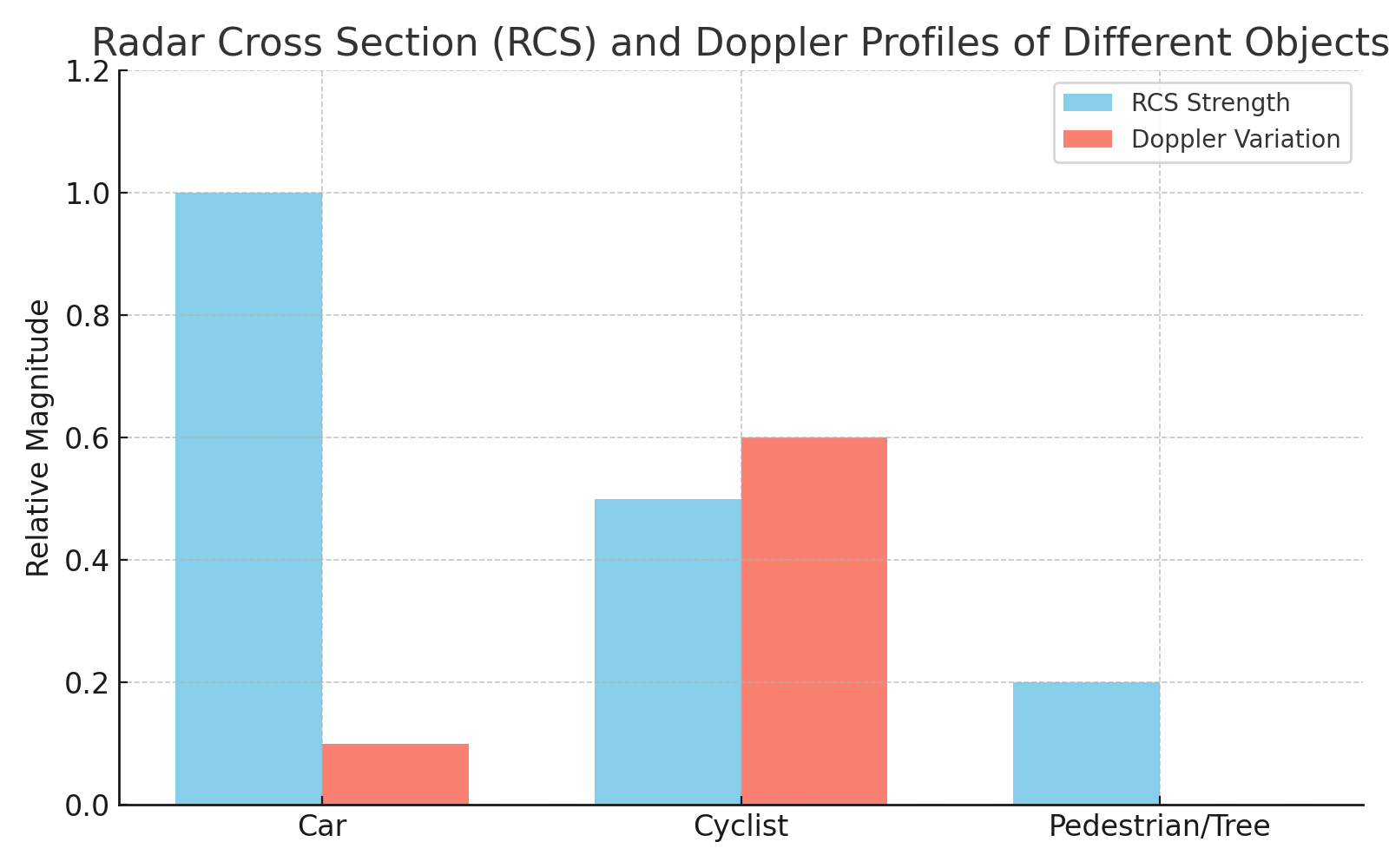
A bike radar distinguishes objects by combining RCS strength, Doppler motion, range/angle tracking, and post-processing algorithms. Cars look “big and steady,” cyclists look “medium and fluctuating,” pedestrians/trees look “small and static.” Advanced AI enhances these classifications, making them more reliable and reducing false alarms.
Detection Challenges
Distinguishing between cars, cyclists, pedestrians, and static objects is one of the most challenging aspects of radar engineering. Here are the main challenges:
1. Overlapping RCS Values
Cars usually have high Radar Cross Section (RCS), but large trucks and small cars can overlap. Cyclists with reflective metal frames can look “larger” than pedestrians. In cluttered urban environments, metallic signposts or guardrails may even return car-like reflections.
Challenge: Pure RCS thresholds aren’t enough for reliable classification.
2. Doppler Ambiguities
Cyclists produce fluctuating Doppler due to pedaling, but at certain speeds, their average Doppler looks very similar to that of a slow-moving car. Pedestrians usually have very low Doppler, but wind-blown trees can also mimic that.
Challenge: Doppler helps, but it’s noisy and context-dependent.
3. Multipath and Clutter
Urban areas produce reflections from walls, fences, and parked vehicles. Multipath can create “ghost” detections, where a car is detected twice at different ranges.
Challenge: Filtering clutter while preserving real detections is extremely difficult.
4. Limited Antenna Aperture
In a bike radar, antenna size is constrained, limiting angular resolution. A cyclist beside a car may appear as one merged detection blob.
Challenge: Hard to separate objects when the angular resolution is poor.
5. Environmental Conditions
Rain, fog, snow, and dust can lower the signal-to-noise ratio. Wet clothing or non-metallic bikes reduce cyclist RCS, making cyclists harder to detect reliably.
Challenge: Maintaining accuracy across all weather conditions.
6. Real-Time Constraints
Bike radars run on low-power SoCs, not powerful automotive CPUs. Real-time classification must be done with lightweight algorithms, which limits the complexity of AI models.
Challenge: Balancing detection quality with battery life and hardware limits.
7. Data Scarcity for AI Training
Cars are well-represented in datasets, but cyclists, pedestrians, pets, and roadside clutter are not. Training machine learning models without sufficiently diverse data leads to poor generalization.
Challenge: Building large, annotated radar datasets for bikes.
Accurately distinguishing cars, cyclists, pedestrians, and clutter is hard because:
- RCS and Doppler overlap between classes.
- Clutter and multipath create ghost signals.
- Hardware constraints limit angular resolution and AI complexity.
The typical solution involves sensor fusion (radar + vision), machine learning post-processing, and more intelligent signal filtering tailored for cycling environments.
You might be interested in this Garmin Varia RTL515 review.
Why Do False Positives Happen?
False positives, when the radar alerts the rider even though there’s no real threat, are one of the most common challenges in radar engineering. They happen because radar is highly sensitive, and in the real world, not every reflection comes from a car.
They can occur because radar is easily “distracted” by roadside clutter, multipath echoes, and non-vehicle objects. By combining signal processing, RCS/Doppler thresholds, sensor fusion, and machine learning, engineers can dramatically reduce false alarms, ensuring riders get alerts only when they truly matter.
Common Causes of False Positives
- Environmental Clutter – Guardrails, signposts, parked cars, and even road signs can reflect radar waves strongly.The radar may misinterpret these reflections as moving vehicles.
- Multipath Reflections – In cities, signals bounce off walls or buildings before reaching the radar. This can create “ghost objects” at the wrong distance or angle.
- Small Moving Objects – Pedestrians, cyclists, or even animals can trigger the system when the rider is only interested in warnings about cars.
- Limited Angular Resolution – With small antennas, a radar may merge two close objects (e.g., a cyclist next to a car) into one, producing inconsistent alerts.

Techniques to Reduce False Positives
- Advanced Signal Processing – Apply velocity filters to ignore objects moving at speeds inconsistent with those of cars. Use range gating to suppress static clutter like trees or signposts.
- Radar Cross Section (RCS) Thresholding – Cars usually have a larger RCS than cyclists or pedestrians. Filtering weak signals helps reduce alerts from irrelevant objects.
- Doppler Pattern Recognition – Pedal motion and walking speed create distinct Doppler patterns. Classifying these patterns helps distinguish between cars, cyclists, and pedestrians.
- Sensor Fusion (Radar + Vision) – Combining radar’s distance/speed accuracy with a camera’s object recognition can drastically reduce false alarms. Example: Radar detects an object, vision confirms whether it’s a car.
- Machine Learning – Training models with real-world cycling data allows the radar to “learn” which reflections are relevant threats. AI can adapt to different environments (urban vs rural) and rider preferences.
Practical Trade-Offs
- More sensitivity = more safety alerts, but also more false positives.
- More filtering = fewer false positives, but higher risk of missing threats.
The challenge for designers is finding the sweet spot between safety and rider confidence.

Maximum Detection Distance Range and Accuracy
Near the limit, accuracy degrades, distance error grows, angle precision weakens, and detections become less consistent. Designers must carefully balance range, accuracy, and reliability to give riders safety without overwhelming them with false alarms.
1. Maximum Detection Distance
Typical bicycle radars (24 GHz band): ~ 60~70 meters under good conditions. The actual max detection distance could reach 120~150 meters under acceptable conditions.
Detection distance depends on radar frequency, antenna size, transmit power, and RCS of the target. A car (large RCS) can be detected at the maximum distance, but a cyclist or pedestrian will be detected much closer.
2. Accuracy Near the Limit
At short to mid-range (0–80 m): distance accuracy is typically within ±0.5–1 m. At the limit (~120–150 m), the distance error can increase to ±2–3 m. Angle accuracy degrades; instead of ±2–3°, it may increase to ±6–8°. The detection confidence also drops (radar may intermittently lose the target).

3. Factors That Influence Accuracy
- Target RCS: Cars reflect strongly, but a pedestrian in dark clothing has a weak return.
- Environment: Rain, fog, or multipath reflections reduce signal-to-noise ratio.
- Antenna Beamwidth: Narrow beams maintain range but limit coverage; wide beams improve coverage but reduce accuracy at distance.
- Signal Processing: Advanced filtering and AI help stabilize classification near the detection edge.
4. Engineering Trade-Off
Pushing for a longer range improves safety (more reaction time) but risks false positives at the edge. Tighter filtering reduces noise but increases the likelihood of false negatives (missed detections). The “sweet spot” for bicycle radar design is often reliable car detection at 100–120 m, with acceptable accuracy and rider trust.

False Negatives
A false negative means the radar fails to alert the rider about a car that’s really there. While less common than false positives, they are more dangerous. Here are the main reasons why they happen in the first place:
1. Low Radar Cross Section (RCS) Angles
Radars rely on reflections from a car’s metallic surfaces. If a car approaches at a steep angle or only exposes a small surface (e.g., a motorcycle with a narrow profile), the RCS drops. This results in the signal falling below the detection threshold.
2. Multipath & Signal Cancellation
Radar waves can bounce off the road, guardrails, or other vehicles before reaching the radar. Sometimes direct and reflected signals cancel each other (destructive interference), reducing detection strength. This effect is worse on wet roads or in urban “canyons.”
3. Short-Range Blind Spot
Some radars have a minimum detection distance (e.g., <5 m). If a car is already very close, the radar may not be able to recognize it in time.
4. Environmental Factors
Heavy rain, fog, or snow scatter radar waves, lowering the signal-to-noise ratio (SNR). Strong sunlight and heat can increase electronic noise, further lowering sensitivity.
5. Antenna Limitations
Bicycle radars have small antennas due to form-factor constraints. This limits angular resolution → a car partially outside the beam may not be fully tracked. At beam edges, detections can be intermittent.
6. Processing & Filtering Trade-offs
To avoid false positives, radars use filters (ignore small or erratic reflections). Sometimes, a real car with an unusual profile or speed may be mistakenly filtered out.
7. Interference from Other Devices
In group rides, multiple radars (or even nearby automotive radars) can cause interference. Overlapping signals can confuse the detection algorithm, creating gaps.
How Engineers Reduce False Negatives
False negatives occur due to physical limitations (weak reflections, interference), environmental factors (weather, road conditions), and engineering trade-offs (filters, antenna size). The key challenge is balancing sensitivity (not missing cars) with filtering (not alerting unnecessarily).
- Adaptive thresholds: Adjust detection sensitivity based on the environment.
- Multi-frame tracking: Confirm an object over multiple scans before dismissing.
- AI classification: Helps distinguish cars even when reflections are weak or noisy.
- Sensor fusion: Radar + vision ensures redundancy.

Insufficient signal measurement can result in missed detections.
How Many Objects Can Radars Detect at Once?
Bicycle radars can detect 10–20 objects at once in typical designs, but the real value comes from smart filtering, focusing only on vehicles that matter to the rider’s safety. Advanced radars, especially those equipped with AI, can manage more objects, but this must be balanced with considerations such as battery life and usability. Typical consumer-grade mmWave radar (like TeraSilic’s 24GHz radar) can track 8 VIP targets simultaneously.
1. Hardware Capabilities
Modern FMCW (Frequency-Modulated Continuous Wave) radars can detect dozens of targets simultaneously within their field of view. The exact number depends on:
- Channel count (number of transmit/receive antennas).
- Processing power of the radar’s DSP or MCU.
- Beamforming capability: wider beams capture more objects but with less angular resolution.
Typical consumer-grade bicycle radars (24 GHz) can reliably track 10–20 moving objects at once.

2. Detection Prioritization
Even if a radar sees many objects, not all of them are useful for cyclists.
- Cars directly behind are prioritized.
- Parallel cyclists or roadside clutter may be ignored or de-weighted.
- The radar firmware decides which detections trigger alerts to the rider.
3. Accuracy vs. Quantity Trade-off
- Tracking more objects requires more processing and increases power consumption.
- Aggressive filtering reduces load but risks missing subtle threats.
- Designers aim for a balance: enough simultaneous tracks to ensure safety, without overwhelming the rider or draining the battery.
4. Real-World Example
On a busy road, the radar might detect 15 or more vehicles (cars, trucks, cyclists, pedestrians). The system filters these down to the most relevant 3–5 threats, which trigger alerts on the bike computer or rear light.
You might be interested in this Wahoo TRACKR Radar review.
Do Bike Radars Interfere with Each Other?
Multiple radars in a group ride can interfere, but clever engineering (frequency shifts, randomized chirps, and signal coding) keeps interference manageable. False alarms may increase slightly, but critical detections (cars behind the group) remain reliable. Future systems may feature cooperative radar networks, where interference becomes collaboration.
1. The Potential for Interference
Bicycle radars typically operate in unlicensed ISM bands (24 GHz). When multiple radars transmit in close proximity, their signals can overlap, creating “cross-talk.” This may manifest as:
- Ghost detections (false positives caused by another rider’s radar).
- Dropped detections (false negatives when two signals cancel).
- Noisy returns (reduced confidence in object classification).

2. Why It’s Usually Manageable
Radar designers use several techniques to minimize group ride interference:
- Frequency Diversity: Each radar slightly shifts its carrier frequency (within the allowed band), so they don’t sit on top of each other.
- Time Division (TDM/FMCW Randomization): Radars use randomized chirp start times so two units are less likely to transmit the exact same pattern simultaneously.
- Signal Coding: Some chipsets apply pseudo-random phase codes to make each radar’s “signature” distinct, even if another radar is nearby.
3. Real-World Impact
In practice, a group ride with 5–10 radars may see occasional extra blips but without constant failures. The strongest return (a car directly behind the group) usually dominates, so interference rarely hides critical threats.
4. Engineering Challenges & Improvements
- Limited Bandwidth: Bikes often use narrower channels, increasing overlap risk.
- Form Factor: Small antennas = less beam control, so stray signals are more likely.
- Future Solutions: AI post-processing and multi-radar cooperation (devices sharing data via ANT+/BLE) could turn a group ride into a collaborative radar mesh, reducing interference and boosting safety.
Why Bicycle Radars Struggle with Side Visibility Detection
Most current bicycle radars are optimized for rear-facing detection (cars approaching from behind). Detecting side traffic, cars crossing from intersections or overtaking diagonally, is significantly more challenging.
1. Antenna Field of View (FoV) Limitations
Bicycle radars use narrow-beam antennas to maximize range (100–150 m) and sensitivity for rear traffic. Side detection requires wide-angle coverage, but widening the beam reduces sensitivity and maximum distance. Trade-off: Long-range accuracy versus wide-angle coverage.

The radar’s sensing area and its associated description.
2. Mounting Constraints
Radars are usually mounted on the seatpost or rear light position, pointing backward. To detect sides, you’d need additional radars angled left/right. Adding side-facing antennas increases size, weight, and cost, which is a significant constraint for cyclists.
3. Signal Reflection Challenges
Side objects often have smaller radar cross-sections (e.g., car doors, bike frames) compared to a full rear car profile. This makes them harder to detect at an angle, especially amid clutter from buildings, pedestrians, and parked vehicles.
4. Processing Budget & Power
More coverage = more data streams, so a single-chip radar with limited DSP/MCU resources may not handle multi-angle real-time processing without draining the battery. To cover the sides and the rear, designers often need multiple antennas or multi-channel radars, which increases complexity.
5. Safety Relevance & Prioritization
Rear collisions are statistically the most dangerous and common for cyclists. Side detection at intersections is important, but often better handled by camera-based or V2X (vehicle-to-everything) systems. This has led bike radar makers to focus on rear detection first, where radar has the clearest advantage.
Possible Solutions
- Multi-radar systems: One rear-facing + two angled side units.
- Phased-array radars: Electronically steerable beams to cover wider FoV without physical rotation.
- Radar + vision fusion: Radar tracks motion, vision confirms lateral approach.
- AI-enhanced filtering: To distinguish side vehicles from irrelevant clutter.
The biggest technical limitation is that radar beams are directional, great for spotting cars behind you at long range, but not wide enough to cover cross traffic. Solving side detection requires extra antennas, smarter beamforming, or multi-sensor fusion, all of which add cost, power, and design challenges.
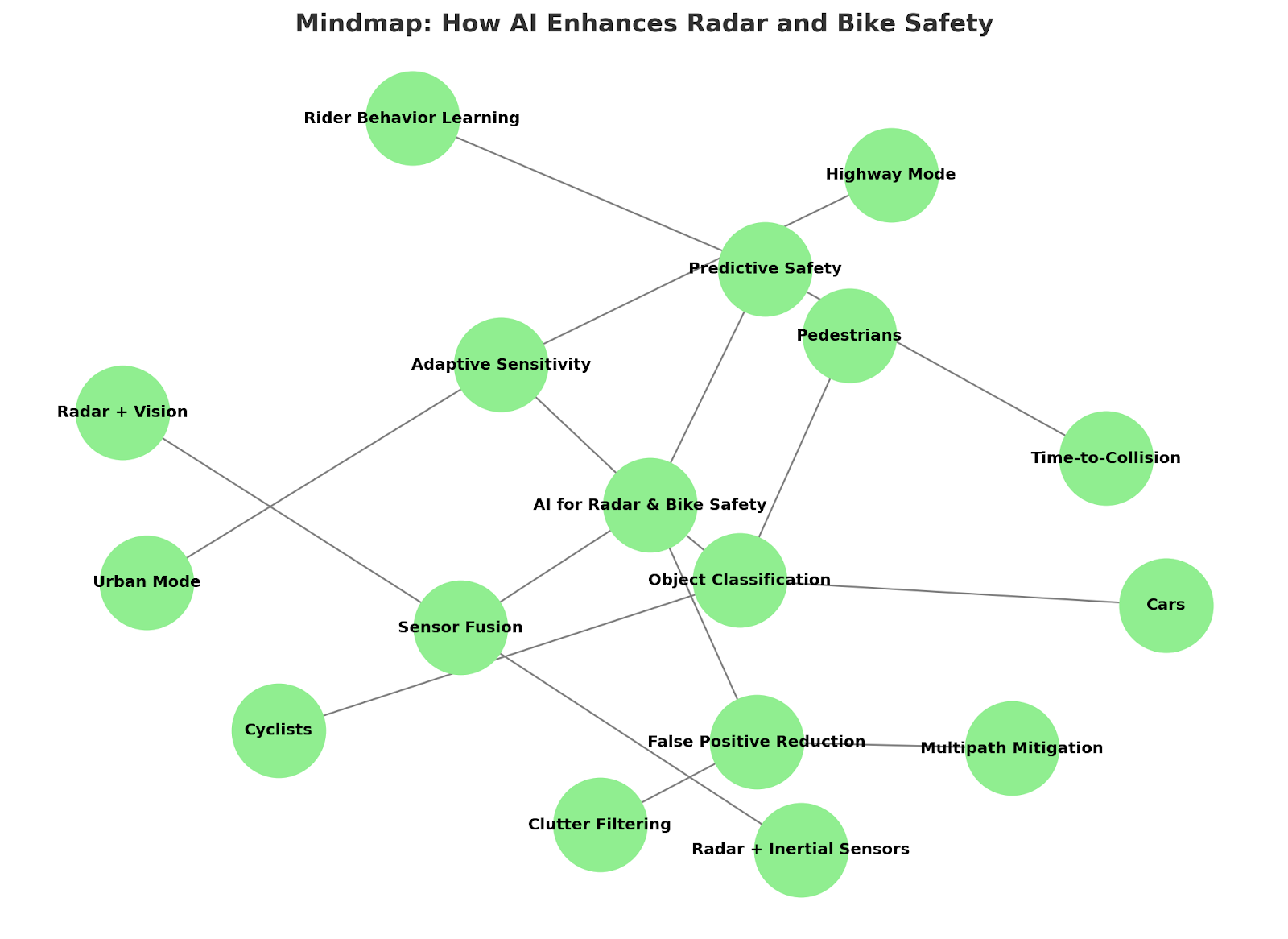
How Can AI and Machine Learning Improve Detection?
AI and machine learning can significantly enhance radar performance in ways that traditional signal processing alone cannot.
1. Smarter Object Classification
Traditional radar gives raw data: range, speed, angle, and radar cross-section. Machine learning models (CNNs, RNNs, or lightweight edge models) can take this data and classify objects:
- Car vs. motorcycle vs. cyclist vs. pedestrian vs. random clutter.
This reduces false positives (e.g., radar confusing a bush for a car) and improves rider trust.
2. Reducing False Alarms with Context Awareness
AI can learn roadside patterns and distinguish between a “moving threat” and a “static background.” Example: Guardrails and parked cars often confuse raw radar data; an AI-trained model can filter them out. This makes alerts more relevant and less annoying for cyclists.
3. Multi-Sensor Fusion
Radar alone is great for distance and speed, but poor at visual classification. Cameras are great at recognition, but weak at night or in fog. AI can fuse radar + vision + inertial sensors to produce a confidence score: “That’s definitely a car, 120 m behind, approaching at 20 km/h.” This is already standard in automotive ADAS and is now being adopted in cycling technology.
4. Adaptive Sensitivity and Personalized Detection
Machine learning can tune radar sensitivity dynamically:
- Urban riding → shorter range, filter out clutter.
- Highway/commuting → long range, high sensitivity.
Future systems could even learn rider behavior: some cyclists may prefer earlier warnings, while others may only require critical alerts.
5. Edge AI Deployment
Thanks to modern radar SoCs with embedded AI accelerators, it’s now feasible to run compact ML models directly on the bike radar hardware. This avoids cloud dependency, keeps latency low, and preserves privacy.
The Future of Bicycle Radars with AI
Expect next-gen bicycle radars to feature AI firmware updates, improving performance over time. Similar to how Tesla cars improve with software updates, your bike radar could become smarter with every update, reducing false alarms, enhancing detection in challenging conditions, and adapting to new cycling environments.
Radar Hardware Limitations
The biggest hardware limitation is the combination of size, power, and ruggedness. Antennas need to be large, but the device must be small. Chips require more power, but the battery is tiny. Heat needs to escape, but the housing must be waterproof.
It’s this triangle of performance, form factor, and durability that defines the hardest engineering trade-offs in bicycle radar hardware.
1. Antenna Size vs. Bike-Friendly Form Factor
Radar performance depends heavily on the antenna aperture size: a larger antenna improves angular resolution (the ability to tell two objects apart). But bicycles demand tiny, lightweight devices.

2. Power & Battery Capacity
Radars operate at 24GHz, requiring precise RF electronics that inherently consume significant power. Cyclists expect 6–12 hours of runtime, but the available battery capacity is very limited. Designers must constantly optimize power amplifiers, duty cycling, and SoC integration to balance performance and long rides.
3. Heat Dissipation in Sealed Enclosures
High-frequency chips generate heat. But bike radars must be IP67/IP68 waterproof, meaning no vents for cooling. This creates thermal bottlenecks; overheating can degrade RF performance or shorten component life. Engineers rely on thermal spreading materials, low-power chipsets, and efficient packaging to manage this.
4. Material & Environmental Constraints
Radars must transmit and receive signals through plastic enclosures. Choosing the right radome material is critical: it must be transparent to RF, UV-resistant, impact-resistant, and lightweight. The radars must also withstand environmental stresses, such as vibration, rain, UV, dust, and even mud.
What Factors Affect the Radar Performance?
Below are the factors that affect radar performance.
Power and Battery Management
Modern bicycle radars use mmWave transceivers that can be power-hungry when run continuously. To keep battery life practical for cyclists, manufacturers optimize power in several ways:
1. Duty Cycling
Radar does not transmit continuously; instead, it pulses in short bursts. By reducing the active transmission time, average power drops by 30–50% while still maintaining effective detection.
2. Dynamic Power Scaling
Radar modules adjust transmit power based on range requirements. For example, in city riding where speeds are lower, the system can reduce power since long-range detection (>100 m) is less critical.
3. Integrated Radar SoCs
Newer designs combine RF, baseband, and microcontroller into a single chip. This reduces overhead from multiple components and cuts total consumption by 20–40%.
4. Event-driven Processing
The radar stays in a low-power monitoring mode and only activates full processing when motion is detected. Similar to how smartphones use always-on sensors for waking up.
Practical result: Modern bicycle radars typically consume 1.5–2.5 W, resulting in 6–12 hours of operation depending on battery size.
What’s the Impact of Light Modes and Detection on Battery Life?
Most bicycle radars are integrated with rear safety lights, meaning the battery must support both illumination and radar sensing. Radar detection itself is relatively power-efficient thanks to duty cycling and SoC integration. It’s the light modes that often consume the most battery. Intelligent battery management balances visibility and detection to keep cyclists safe without constant recharging.
- Light Consumption – Rear LEDs draw 0.5–1 W depending on brightness and flashing mode. A high-intensity flashing mode can nearly double the power draw compared to the eco mode.
- Radar Consumption – The radar itself usually consumes ~1.5–2 W (constant). Unlike lights, radar power consumption is steady and less affected by mode.
- Combined Effect – With radar + steady light, total power ≈ 2.5–3 W. With radar + high-flash mode, total power ≈ 3.5 W or more.
That means light mode choice can change total battery life by 20–30%. Cyclists who want maximum runtime often choose flashing or eco modes, since radar detection itself is relatively efficient.
Example Battery Life (1000 mAh, 7.4 V pack ≈ 7.4 Wh)
| Mode | Power Draw | Runtime (hours) |
|---|---|---|
| Radar only | 1.8 W | ~4.1 h |
| Radar + eco light | 2.5 W | ~3.0 h |
| Radar + high-flash LED | 3.5 W | ~2.1 h |
What Are the Challenges in Radar Design?
Designing a bicycle radar is not just about “detecting cars.” It’s a delicate balance of physics, electronics, and real-world usability. Here are the main challenges:
1. Balancing Sensitivity vs. False Alerts
High sensitivity ensures that fast-approaching cars can be detected from 120–150 m away. But too much sensitivity leads to false positives (trees, guardrails, roadside objects). The challenge: tuning radar signal processing and AI filters so that cyclists are warned of real threats without being overloaded with unnecessary alerts.
2. Hardware Constraints
- Size & Weight: Cyclists don’t want heavy or bulky devices on their seatpost or rear rack. Designers must fit antennas, processors, and batteries into a package smaller than a bike light.
- Waterproofing & Durability: Radars must survive rain, dust, vibration, and crashes. Achieving IP67/IP68 ratings in a compact form is a serious engineering challenge.
- Thermal Management: High-frequency radars (60–77 GHz) generate heat, which must be dissipated in a sealed, waterproof enclosure.
3. Software & Firmware Tuning
- Signal Processing: Extracting useful information (speed, range, angle) from noisy radar returns.
- Object Classification: Filtering out irrelevant targets like cyclists or parked cars.
- User Experience: Firmware must balance accuracy with low-latency alerts, so riders get warnings in time to react.
4. Mounting Compatibility
Seatpost shapes (round, aero, D-shaped) and rear racks vary widely. Mounting angle impacts detection performance: too high and you miss close cars; too low and the road generates clutter. Engineers must design flexible mounts that still preserve optimal detection geometry.
5. Power & Battery Management
Radar + lights + wireless connectivity can drain power quickly, but cyclists expect all-day rides (6–12 hours) on one charge. This makes optimizations like duty-cycling, low-power SoCs, and efficient LED drivers essential.
6. Connectivity & Integration
Radars must connect seamlessly with cycling computers, smartphones, and apps. Maintaining reliable ANT+/Bluetooth Low Energy links while minimizing energy drain is a technical balancing act. As new devices (helmets, e-mirrors) emerge, interoperability becomes more complex.
7. Regulatory Compliance
Different regions regulate radar frequencies (24 GHz). A global bike radar product must comply with FCC (US), CE (EU), MIC (Japan), NCC (Taiwan), etc. This often requires multiple hardware versions or tunable RF designs.
8. Cost vs. Performance
Cyclists are price-sensitive. Adding advanced radar chips, AI processors, and connectivity increases cost. The challenge: balancing affordability with cutting-edge safety features.
Summary
Bicycle radar design is a multi-dimensional challenge:
- Electronics engineers must shrink and ruggedize the hardware.
- Signal processing experts must tune algorithms for real-world roads.
- Designers must ensure ease of mounting and user-friendliness.
- And all this has to fit within a cyclist’s budget and expectations for safety, reliability, and long rides.
What Does the Future of Bicycle Radars Look Like?
The future of bicycle radar is not just about detecting cars behind you—it’s about building a safer cycling ecosystem, where every rider and fleet can benefit from real-time, intelligent protection. Here are some possible trends.
1. AI-Powered Object Classification
Today’s bicycle radars can detect objects but struggle with classification. Future radars will combine:
- Radar + AI vision fusion → merging radar’s distance/speed accuracy with camera’s object recognition.
- Ability to differentiate cars, trucks, cyclists, pedestrians, or even animals.
- Reduction of false positives (e.g., radar mistaking a bush for a vehicle).
Figure idea: Flow diagram: Radar detects distance/speed → AI vision labels object type → Combined output = “Car, 120 m, approaching fast.”
2. Smarter Safety Ecosystems
Instead of just alerting the rider, radars will become part of a connected ecosystem:
- E-Mirror systems: digital rear-view mirrors on handlebars.
- Connected helmets: radar alerts integrated into helmet audio or HUD (heads-up display).
- Bike-to-cloud data sharing: fleet operators (rental, delivery, leasing) get safety analytics.
This transforms radar from a personal gadget into a fleet-level safety platform.
3. Ultra-Low Power and Compact Design
Cyclists care about weight and battery life. The next wave of radars will focus on:
- <2 W power consumption (vs 3–4 W today).
- PCB integration into bike lights or seatposts, making radar invisible but always on.
4. Regulatory and ESG Drivers
European cities are pushing for cycling safety as part of Vision Zero and ESG targets. Expect subsidies or incentives for bikes equipped with advanced radar safety systems (similar to ABS adoption on motorcycles).
Summary of Key Trends
- Radar + AI vision fusion for smarter classification and fewer false alarms.
- Integration with e-Mirrors, helmets, and fleet platforms.
- Miniaturization & low-power design, blending seamlessly into bike hardware.
- Policy and ESG momentum accelerating adoption.
Conclusion
Bicycle radars are safety devices that use millimeter-wave radar technology to detect vehicles approaching from behind, providing real-time alerts to the cyclist via bike computers, smartphones, or integrated lights. These systems emit radio signals, analyze the reflections (using the Doppler effect), and calculate the distance, speed, and angle of approaching objects, allowing the device to distinguish between cars, cyclists, and pedestrians by utilizing a combination of radar cross-section (RCS), Doppler shift, and pattern recognition. The latest designs incorporate advanced signal processing and AI to improve object classification, reduce false positives, and enhance detection in challenging environments.
Despite their utility, bicycle radars face several technical limitations, including false positives (usually from roadside clutter or multipath reflections), false negatives (due to weak reflections or environmental interference), and constraints related to battery life, antenna size, and processing power. The field of view is typically optimized for rear detection, limiting side visibility, and multi-object detection is managed by smart filtering to prioritize safety threats. Future trends point toward AI-powered object classification, integration with connected cycling ecosystems, and ever-smaller, more power-efficient designs that will expand capabilities and make radar alerts more accurate, reliable, and seamlessly integrated into bike hardware.
Again, many thanks to Terasilic and Andy for their time and the valuable information they provided.